Motion Control
thumbnail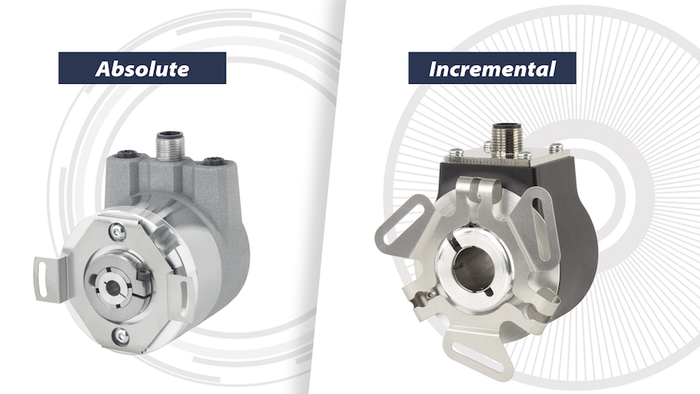
Sponsored ContentAbsolute vs. Incremental Rotary Encoders: Which is Best?Absolute vs. Incremental Rotary Encoders: Which is Best?
Both types of rotary encoders provide motion sensing and feedback about a rotating shaft. Knowing their differences will help you choose the right type for your needs.

.jpg?width=700&auto=webp&quality=80&disable=upscale)





























.svg?width=300&auto=webp&quality=80&disable=upscale)




Editors' Choice




Jun 4 - Jun 6, 2024
Jun 4 - Jun 6, 2024
Innovation in automation starts here. Discover and collaborate on automation solutions that are revolutionizing the entire production lifecycle — from design to production to market — and sharpen your competitive edge. ATX South is part of IME South, a six-in-one expo offering the latest insights & solutions spanning medtech, packaging, automation, plastics, design, & processing.
Register NowSign up for the Design News Daily newsletter.