Sign up for the Design News Daily newsletter.
Researchers at Harvard University have developed soft robotic actuators inspired by human muscle.
Elizabeth Montalbano
June 2, 2016
4 Min Read
.svg?width=850&auto=webp&quality=95&format=jpg&disable=upscale "Soft Robotic Actuators Inspired by Human Muscle")
Researchers are beginning to bridge the gap between humans and robots by inventing technology to make it safer for them to work alongside each other. As part of this effort, researchers at the Wyss Institute for Biologically Inspired Engineering at Harvard University have developed vacuum-driven soft robotic actuators that work like human muscles.
Wyss is at the forefront of robotic research, and the new soft robotic actuators -- called vacuum-actuated muscle-inspired pneumatic structures (VAMPs) -- demonstrate some of their cutting-edge work. The team -- led by George Whitesides, a core faculty member at the institute -- was inspired by the human bicep muscle to develop actuators similar to skeletal muscles that use vacuum power to automate soft, rubber beams.
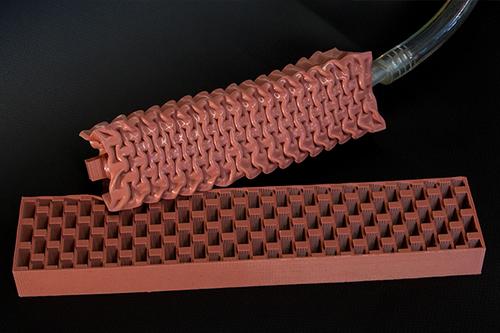
Researchers at Harvard University’s Wyss Institute for Biologically Inspired Engineering have developed soft robotic actuators inspired by human muscle. The actuators act very similarly to human muscle and make it safer for the robots using them to work alongside humans because they are soft and pose no threat to their surrounding environment.
(Source: Wyss Institute, Harvard University)
The benefits of the actuators are that they are soft, absorb shock, and pose no danger to humans that might be working alongside robots that use them, or to the surrounding environment, researchers said. The work brings researchers a step closer to being able to build entirely soft-bodied robots, which will inspire more human-robot interaction and provide innovative applications for industrial and medical fields, among others, they said.
“Functionally, our actuator models the human bicep muscle," said Whitesides, who is also a director of the Kavli Institute for Bionano Science and Technology at Harvard University. "There are other soft actuators that have been developed, but this one is most similar to muscle in terms of response time and efficiency.” He and the team published an article about their work in the journal, Advanced Materials Technologies.
Researchers built the actuator out of soft rubber or elastomeric beams filled with small, hollow chambers of air, similar to the design of a honeycomb. When the vacuum is applied, the chambers collapse and the entire actuator contracts, which generates movement. Because of its honeycomb structure, the actuator can be tailored to enable linear, twisting, bending, or combinatorial motions, researchers said.
![]() Empower with Automation. Enhance the productivity of your factory with the power of collaborative robotics. Learn how at Industry 4.0: Smart Manufacturing, part of Atlantic Design & Manufacturing Expo, June 16 in New York. Register here for the event, hosted by Design News’ parent company UBM. Enter promo NY16DN for a FREE Expo pass & 20% off Industry 4.0 Conference.
Empower with Automation. Enhance the productivity of your factory with the power of collaborative robotics. Learn how at Industry 4.0: Smart Manufacturing, part of Atlantic Design & Manufacturing Expo, June 16 in New York. Register here for the event, hosted by Design News’ parent company UBM. Enter promo NY16DN for a FREE Expo pass & 20% off Industry 4.0 Conference.
Researchers acknowledged that the design of the actuators is unconventional in the way that it uses the vacuum. The design relies on the vacuum to decrease the actuator’s volume and cause it to buckle, which is typically thought of as mechanical instability and thus a point of failure, they said. However, the team used the instability to develop the VAMPs, which mimic muscle because they contract rather than expand in volume, as soft actuators that rely on pressurized systems typically do, researchers said.
Their design makes them suitable for use in service robots, such as those that can be used to assist the disabled or elderly, serve food, deliver goods, or perform similar tasks. The actuators also could be used in robots on industrial production lines, making them safer, faster, and easier to manage by enabling human operators to work in the same space.
“Having VAMPs built of soft elastomers would make it much easier to automate a robot that could be used to help humans in the service industry," said Dian Yang, who worked on the project as a graduate researcher pursuing his PhD in engineering sciences at Harvard. He is now a postdoctoral researcher.
READ MORE ARTICLES ON ROBOTICS:
Researchers still have a bit of work to do before the VAMPs are ready for use in commercial robots. They still have not developed a complex control system, though they say the actuation is easy to control due to its simplicity -- when vacuum is applied, the actuators will contract.
Another benefit of VAMPs is that they are designed to prevent failure, with the ability to function even with a small hole, researchers said. They also become motionless upon loss of vacuum pressure, Whitesides said. "It can’t explode, so it’s intrinsically safe," he said. This is in contrast to similarly designed actuators, which can combust and cause damage to humans or their surroundings when pressure is lost.
Elizabeth Montalbano is a freelance writer who has written about technology and culture for more than 15 years. She has lived and worked as a professional journalist in Phoenix, San Francisco, and New York City. In her free time she enjoys surfing, traveling, music, yoga, and cooking. She currently resides in a village on the southwest coast of Portugal.
About the Author(s)
You May Also Like
Editors' Choice




Jun 4 - Jun 6, 2024
Jun 4 - Jun 6, 2024
Innovation in automation starts here. Discover and collaborate on automation solutions that are revolutionizing the entire production lifecycle — from design to production to market — and sharpen your competitive edge. ATX South is part of IME South, a six-in-one expo offering the latest insights & solutions spanning medtech, packaging, automation, plastics, design, & processing.
Register Now